Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Walkers
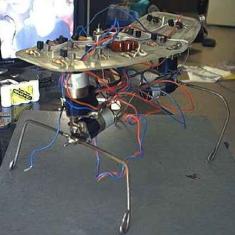
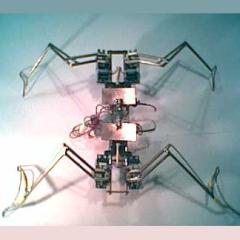
Walkers sú roboty s nohami, a tieto využívajú klasickým spôsobom na pohyb.
Tie najjednoduchšie majú jeden motorček, dve nohy a na chvoste koliesko, ktoré udržuje
stabilitu. Najčastejšie sú však roboty s dvoma, prípadne štyrmi nohami a dvoma
motorčekmi.
Už menej zriedkavé sú potom roboty z 3, 4 alebo aj viacerými motorčekmi. Všeobecne možno povedať, že čím viac motorčekov tento druh robotov obsahuje, tým zložitejšie správanie sa dá od neho očakávať. Na týchto obrázkoch sú zobrazené postupne 6, 4, a 2 motorové Walkers.