Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Crawler
Ako meno naznačuje, je poháňaný zvrásňovaním svojho tvaru, tak že žiadna z častí sa nekĺže proti smeru pohybu, pokiaľ je v kontakte z podlahou. Ku dnešku poznáme tri kategórie:
- Turbots - do tejto kategórie patria roboty, ktoré sa pohybujú použitím ramien. Väčšinou ma Turbot 2 ramená, ktoré rotujú v tom istom smere, ale v pravom uhle voči sebe, čo vyúsťuje v húpavý pohyb. Tu možno nájsť schému zapojenia elektronickej časti takéhoto robota.
- Inchworms sa pohybujú vytvorením vlny na konci svojho tela, ktorá sa presunie postupne dopredu. Týmito vlnitými pohybmi sa potom posúva dopredu. Na obrázku vpravo vidno schému pohybu Inchworma so 4 motormi, z ktorých každý ovláda jeden kĺb a je schopný ho ohnúť o 45°
- Tracked Bots sú vlastne malé tanky medzi BEAM-botmi. Majú jeden alebo dva motorčeky v závislosti od toho či sa budú alebo nebudú otáčať
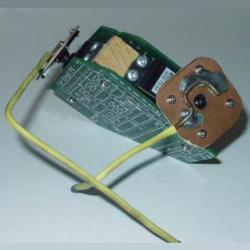
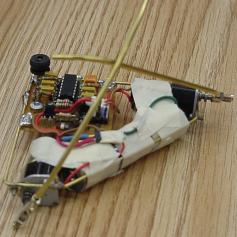
Na obrázkoch vidíme "Turbots"
.