|
Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie
|
|
Stavba nezávisle operujúcich, mobilných robotov inšpirovaných kobylkami

Holk Cruse
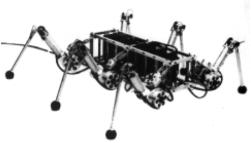
Robot skonštruovaný podľa vzoru kobylky
Hlavným prvkom v tomto odbore je umelá neurónová sieť - model pre riadenie
šiestich nôh bežiaceho robota, ktorý sa znova stáva cieľom skúmania biológa
Prof. Holk Cruse (Univerzita Bielefeld). Už dlho sa zaoberá neurálnymi základmi
pohybu (tiež šesťnohej) kobylky (carausius morosus), teda pracoval na empirickom
neuroetologickom výskume. So svojimi spolupracovníkmi vytváral počítačovú simuláciu
neurálneho modelu (ktorý riadil pohyby simulovanej kobylky). Tú podobne ako
Beer porovnávali so skutočným hmyzom. To je ďalší príklad výpočtovej neuroetológie.
V interdisciplinárnej spoločnej práci bol počas nej aj skonštruovaný model robota,
ktorý bol riadený rovnakou neurónovou sieťou. Vďaka tomu bol model nielen simulovaný,
ale aj testovaný v reálnom svete. Možno tu teda hovoriť o robotickej neuroetológii.
Konštrukcia robotov je lepšia než simulácia v počítači. Skutočné fyzikálne podmienky,
napr. pohyb vpred na šiestich nohách, sú veľmi komplikované, aby sa dali adekvátne
simulovať na počítači. Okrem toho sú simulované podmienky okolitého prostredia
v počítači menej komplexné a nevyspytateľné ako v skutočnom svete. Vždy viac
bádateľov idú preto na to okolo - dobudujú funkčné čiastkové aspekty zvierat
vo forme robotov aby mohli študovať model robota.
|
|
Kontakt: Marek Bundzel |
