Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

MFI projekt
Projekt mikromechanického lietajúceho hmyzu (MFI micromechanical flying insect)
Cieľom projektu MFI je vyrobiť zariadenie schopné autonómneho letu s rozpätím krídel 25 mm. Projekt začal v máji 1998. Jeho konštrukcia sa zakladá na biologických princípoch. Vysoký výkon skutočných múch je založený na veľkej sile generovanej nerovnomernou aerodynamikou, vysoko výkonným systémom pohonu s malou hmotnosťou, a rýchlym riadiacim systémom so zrakovými a interciálnymi senzorami. Ukázalo sa, že piezoelektrický mechanizmus a flexibilná štruktúra hrudníka poskytujú potrebnú hustotu vývinu energie pre záber krídla napájaného lítiovou batériou. Lítiová batéria je dobíjaná solárnymi článkami. V prvých 3 rokoch sa výskum sústredil na porozumenie aerodynamiky letu muchy a na jeho rozbor, dizajn a výrobu MFI pohonných mechanizmov, hrudník a krídla. V auguste 2001vyvinul MFI prototyp (s 1 krídlom) vztlakovú silu na testovacom stanovišti.(Yan et al., 2001)
Objekt z ktorého sa čerpal dizajn pre projekt MFI bola včela - Calliphora.

Jej dĺžka je relatívne dostatočná pre jednoduché zostavenie pohonov, trupu, krídel a elektroniky. Skupina relevantných parametrov je uvedená v tabuľke.
|
Parameter |
Včela |
MFI |
|---|---|---|
|
Pohon |
Sval |
Piezoelektrický |
|
Hmotnosť pohonu (mg) |
50 |
50 |
|
Sila pohonu (mW) |
10 |
12 |
|
Sila krídla (mW) |
5 |
10 |
|
Zotrvačnosť krídla (mg-mm2) |
20 |
20 |
|
Faktor kvality Q |
1-3 |
2 |
|
Rezonančná frekvencia (Hz) |
150 |
150 |
|
Tempo/rotácia krídla (stupne) |
160/120 |
120/90 |
|
Dĺžka krídla (mm) |
11 |
10 |
|
Hmotnosť (mg) |
100 |
100 |
Prvým kritickým parametrom je či je dodané dostatočné množstvo mechanickej sily do krídel. Vedci prišli na to, že hmotnosť pohonu u MFI je porovnateľná s hmotnosťou včely, pri použití piezoelektrického pohonu dokonca vie vyvinúť väčšiu silu pri danej pracovnej frekvencii. U MFI je potrebné mať porovnateľnú hustotu krídla a tlmenie pre uchovanie kvality Q nízkej a vysokej riaditeľnosti.

krídlo prototypu MFI na testovacom stanovišti
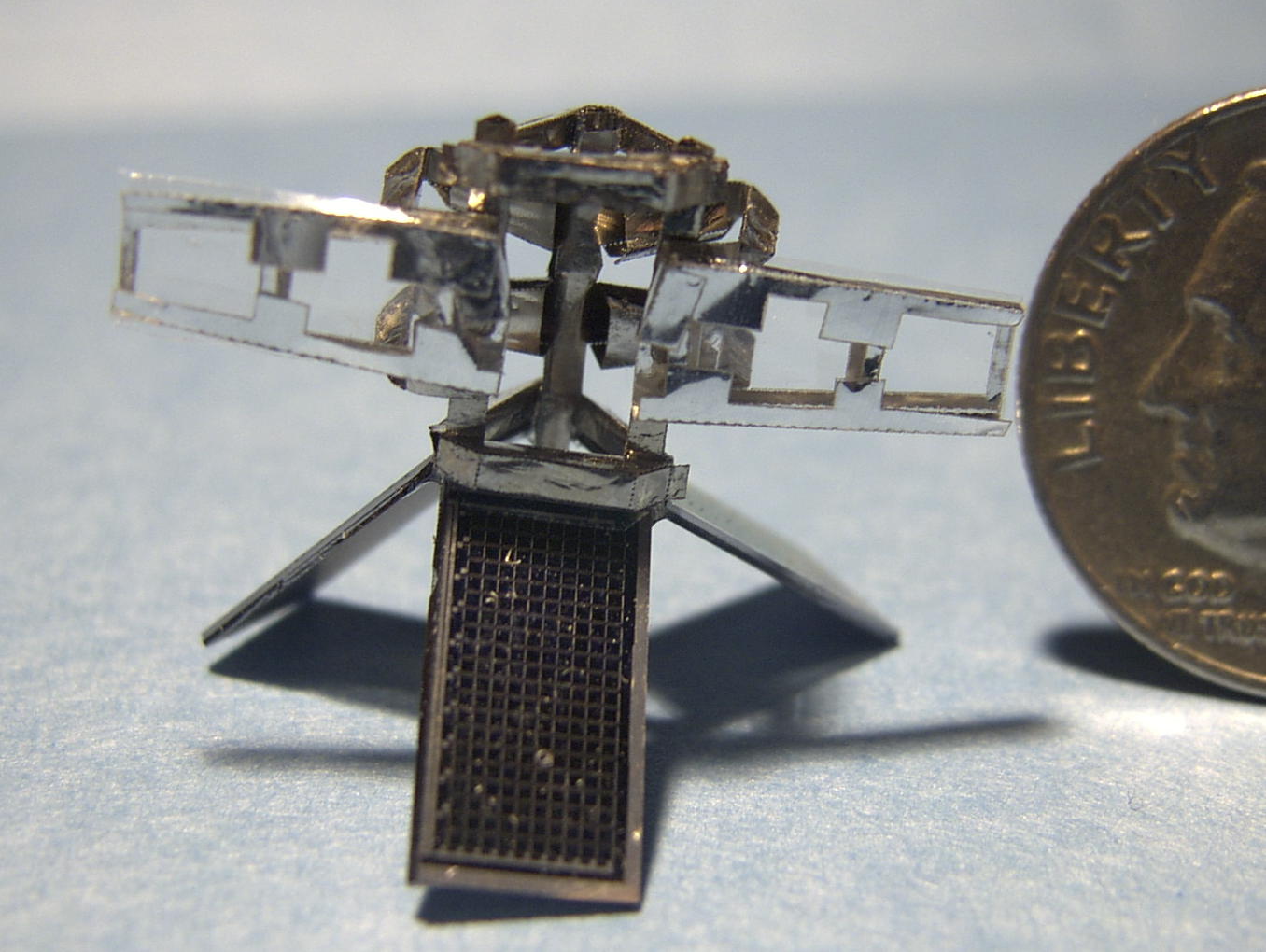

Makety MFI

krídlo MFI a Calliphory
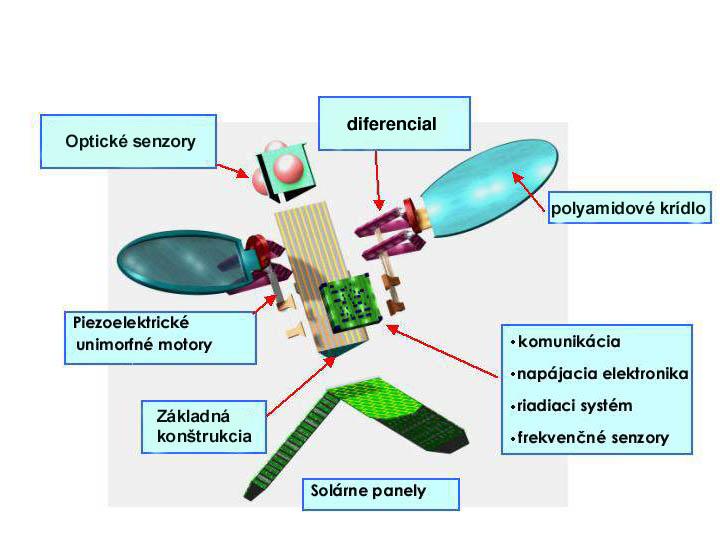
Hlavné komponenty MFI
Integrácia a ovládanie
Hlavné MFI komponenty a podsystémy sú ukázané na obrázku. Od augusta 2001, sa vyrábali konštrukcia, solárne panely, aktivátory, krídla, silové snímače a hrudníkový aparát. Počiatočné testy ukázali generovanie vztlakovej sily mechanizmu na lietanie. Po zvládnutí ovládania vzletu pomocou tohto mechanizmu bude ďalším krokom navrhnúť vhodnú jednotku na výrobu energie, jednotku riadenia letu a komunikačnú jednotku pre diaľkové riadenie. Počiatočným plánom je koncentrovať sa na stabilné vzlietanie, a na používanie jednoduchého optického snímania a vstavaného gyroskopu pre stabilné riadenie polohy hmyzu --- napodobňovanie stratégie riadenia používaného pri muchách. Konečným cieľom je vyrábať a demonštrovať stabilný a autonómny MFI.