Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Dosiahnutie globálneho cieľa celej kolónie

The Ants je spoločnosť mikrorobotov z The MIT Intelligence Laboratory – MobotGroup.

Pri týchto robotoch si autori zobrali vzor z
prírody. Roboty kooperujú a spolupracujú podobne ako mravce v mravčej kolónií. Pri
tomto projekte išlo najmä o splnenie dvoch základných cieľov:
Ants v akcii.
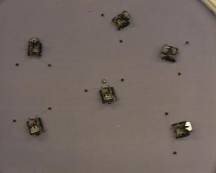
V strede pred robotmi je kúsok jedla. Jeden robot v strede zistil jedlo. Vysiela IR signál,že našiel jedlo. Iné roboty vo vzdialenosti 12 palcov detekujú signál a idú k nemu.
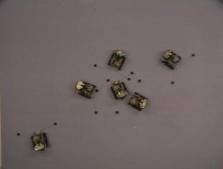
Roboty pri jedle.
Každý robot mal k dispozícií 17 senzorov, 4 svetelné senzory, 4 IR prijímače - vysielače, snímač kolízie, "potravinový" senzor. Roboty komunikujú medzi sebou pomocou dvoch IR prijímačov - vysielačov. Tieto roboty majú niekoľko úrovni sociálneho správania, pomocou ktorých môžu dosiahnuť globálny cieľ celej kolónie. Môžu hrať "Nasledovanie vodcu", Tag a Manhunt


Tri úlohy pre skupinu robotov
Na obrázkoch môžeme sledovať ako sa Robot, ktorý je „It“ snaží sa naraziť do „Not it“ robotov. Roboty musia využiť stratégiu, aby sa vyhli s „It“ robotom. Pri „Manhut“ sú dva tímy robotov, ktoré sa snažia naraziť do členov opačného tímu. Sledujú sa rôzne stratégie a typy spolupráce. Simulovaná mravčia kolónia kompletne s kooperáciou, navigáciou k hniezdu, obranou a všetkým ostatným, čo robia mravčiu kolóniu zaujímavou.


Mravčia farma 15. 12. 1995 zo šiestimi robotmi a dnes.
Iné údaje:
Hardware
Technická
špecifikácia
Software
Antware (software)