Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Skupinové správanie robotov
Interaction Lab Meeting Schedule je laboratórium, ktoré sa ako jedno z prvých začalo zaoberať problematikou správania UI systémov v prostredí a spoluprácou týchto systémov. Všetky experimenty aplikovali na reálne systémy - autonómne roboty.

Na experimenty používajú roboty typu R1, R2.
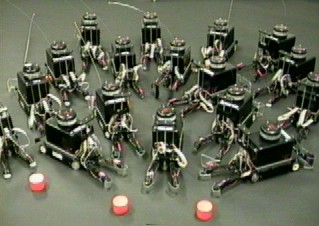
Roboty boli tiež vyvinuté v Interaction Lab Meeting Schedule špeciálne pre výskum v oblasti skupinového správania. Sú vybavené piezoelektrickými nárazníkmi na detekciu kolízie, IR závorou (umiestnenou vo vnútri chápadla) a rádio modemom na detekciu absolútnej pozície na komunikáciu medzi robotmi.

Podobne ako robot R1, aj tento pochádza z Interaction Lab Meeting Schedule. Je vybavený svojim vlastným procesorom, batériami aj komunikačným modulom, svetelným detektorom, piezoelektrickými nárazníkmi na detekciu kolízie, IR závorou (umiestnenou vo vnútri chápadla) a rádio modemom na detekciu absolútnej pozície na komunikáciu medzi robotmi.