Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Kolektívne hry robotov
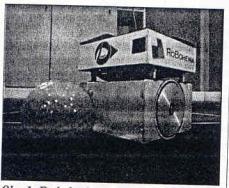
Robot - hráč je mobilná jednotka poháňaná
dvoma nezávisle riadenými elektromotorčekmi spojené dvoma hnacími kolesami. Každý
robot je vybavený riadiacim mikroprocesorom a komunikačnými modulmi pre bezdrôtovú
komunikáciu s nadradeným počítačom. Úlohou mikroprocesora je dekódovať signály z
nadradeného počítača a pomocou regulačných obvodov s polohovou spätnou väzbou
riadiť motorčeky tak, aby bolo čo v najkratšej dobe dosiahnuté jeho žiadanej polohy
na hracej ploche. K riadeniu sa používa pulzovej modulácie signálu a regulátory typu
PID. V prípade, že je požadovaná i určitá rýchlosť pohybu hráča, je použitá i
slučka rýchlosti spätnej väzby. Zdrojom energie je deväť NiMH akumulátorov.
Modul počítačového videnia tvorí farebná CCD
kamera, špeciálna karta pre primárne rozlíšenie farieb, obvody spojené s nadradeným
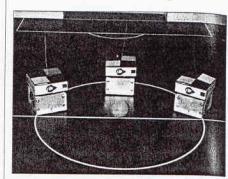
počítačom a programom pre identifikáciu objektu. Hraje sa s golfovými loptičkami
oranžovej farby. K identifikácií hráčov slúžia štyri farebné štvorce umiestnené
na hornej ploche kocky každého hráča. Identifikujú sa vlastný i protivníkovi hráči.
Každý tím má jedného brankára a dvoch hráčov, ktorí podľa hernej situácie plnia
rolu obrancu alebo útočníka. Pravidlá definujú nedovolené zákroky, ktoré píska
ľudský rozhodca. Len v prípade patovej situácie (napr. dvaja hráči sa pretláčajú
čelom k sebe) alebo nariadenie penalty, sa do hry zapája ľudská obsluha. Inak všetko
prebieha podľa programu uloženého v module stratégie v nadradenom počítači (typ
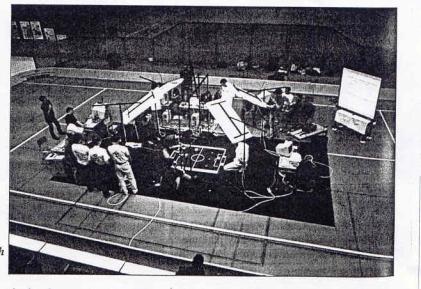
PC). Nad ihriskom 150*130(cm) má každý hráč umiestnenú kameru. Podstatnú rolu hrane
rýchlosť snímkovania scény. VUT dosiahol rýchlosť 50 snímkov za sekundu.
Stratégia riadenia má štyri úrovne
Na najvyššej úrovni s použitím metód umelej
inteligencie a počtu pravdepodobnosti, program vyberá najvhodnejšie akcie. Výsledkom
tejto operácie sú rozhodnutia typu: dotyk s loptou, kopnutie, obrana stoj za loptou…Vo
väčšine prípadov je k správnemu rozhodnutiu nutná i znalosť polohy a predikcie
možných pohybov hráčov protivníka.
K vybranej akcii sa v druhej najvyššej úrovni naplánuje
odpovedajúca dráha robotov (prípadne spolupráca i niekoľkých robotov).
Úlohou tretej úrovne riadenia je nájsť pre zadanú
dráhu (prípadne rýchlosť )odpovedajúce pohyby kolies motorčekov jednotlivých hráčov.
Štvrtá úroveň realizuje potom potrebné impulzy pre napájanie motorčekov.
V štádiu skúšok je modul adaptácie, ktorý podľa zaznamenaných pohybov protivníka ešte v priebehu hry prispôsobuje vlastnú hernú stratégiu.

ORCHESTER ROBOTOV – KOOPERÁCIA
Orchester robotov - roboty zosynchronizovane hrajú na hudobných inštrumentoch jedného typu ako napr. husle, čelo alebo flauta.
