Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie
|
|||||||||

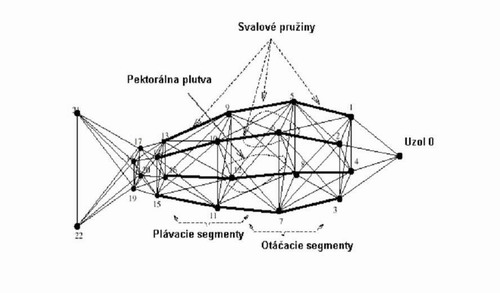
Model ovládania motoriky
Ako z nižšie uvedeného obrázku vyplýva, model tela je zložený z 23 uzlov a 91 pružín. Dvanásť pružín je použitých na simuláciu svalov. Segmenty pre riadenie otáčania sú uložené v prednej časti kostry a segmenty pre plávanie zase v zadnej časti.
Ryba môže plávať pomocou kontrakcie jej svalov. To znamená zväčšovanie alebo zmenšovanie ich dĺžky. Autori používajú na vyjadrenie zmeny dĺžky kontrakčný faktor v rozsahu 0.0 až 1.0.
Pre vyvolanie pohybu sú navrhnuté špeciálne ovládače pohybu - MC (Motors Controllers).
Sú to parametrické procedúry realizujúce elementárne pohyby modelu. Pre pohyb modelu postačujú tri MC:
- Plávanie vpred a vzad
- Otočenie vľavo
- Otočenie vpravo
Rýchlosť pohybu závisí od amlitúdy a periódy pohybu plutvy. Autori si overili tento fakt pomocou testov a získali tak parametre pre maximálnu rýchlosť pohybu simulovanej ryby. Potom je už rýchlosť daná parametrom 0.0 až 1.0 v rozsahu týchto hodnôt.
Otočenie je spôsobené rýchlou kontraciou svalov na jednej strane a uvoľnením na druhej. Potom sú svaly pomaly uvoľňované. Experimentmi sa zistili parametre pre otočenie 30, 45, 60 a 90 stupňov. Interpoláciou týchto parametrov získame ľubovoľný stupeň otočenia. Väčší uhol zase skladaním otočení.