Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

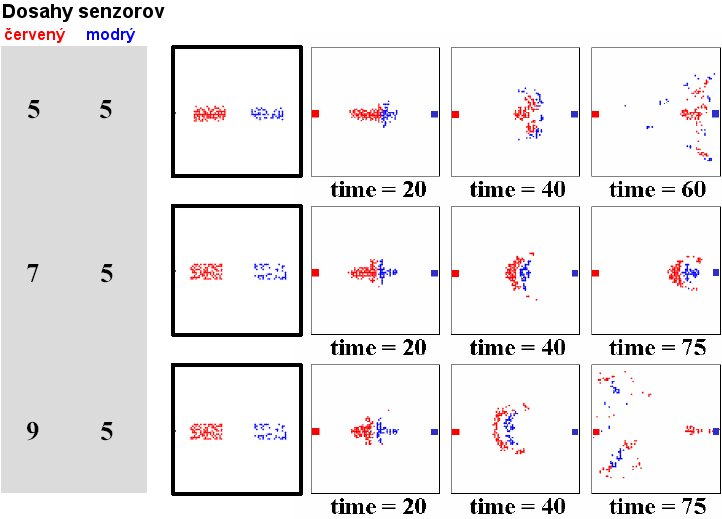
Situácia 8
Táto situácia ukazuje príklad nemonotónneho správania. Tri rady obsahujú zábery z troch rozdielnych prípadov, v každom z nich sa systematicky zvyšuje dosah senzorov červených agentov ako to vidno v ľavej časti obrázku. Dosah senzorov modrých agentov sa pritom nemení a má hodnotu S = 5. Počet agentov na začiatku je 100 červených a 50 modrých. Červený sú okrem toho agresívnejší: modrí sa začnú bojovať iba ak je počet vlastných a cudzích jednotiek minimálne rovnaký, kým červený začnú aj vtedy, keď je jedna jednotka obkľúčená štyrmi protivníkmi. Prvý prípad teda ukazuje čo sa stane, keď je dosah senzorov rovnaký v oboch skupinách. Tu si červený úspešne prerazia cestu až ku modrej vlajke. Pár jednotlivcov je pritom vyrušených prítomnosťou protivníka, preto sa pohybujú iným smerom. Druhý prípad ukazuje, že ak je dosah senzorov červených agentov o dva väčší ako modrých, sú nielen schopní usmerniť každého agenta z družstva k pohybu ku vlajke, ale dokonca nedovolia ani jednému z protivníkov aby sa dostal ku ich vlajke. Na základe väčšieho dosahu senzorov sú červení agenti schopní rýchlo reagovať na každý protivníkov pohyb tak, aby sa nedostal do ich teritória.
Ku tretiemu prípadu by sme intuitívne povedali, že ak ešte viac zvýšime dosah senzorov, agenti budú ešte efektívnejší ale nieje to pravda. Červení agenti sú horší v hodnotení situácie v blízkosti modrej vlajky a v bránení pohybu modrých agentov ku ich vlajke. Takáto situácia nastala kvôli tomu, že na základe väčšieho dosahu senzorov došlo ku získavaniu väčšieho počtu informácií, ktoré nebolo možné efektívne spracovať, čo ešte zhoršilo celkovú bojaschopnosť jednotky.