Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Biomimetické podmorské plavidlá (Northeastern University)
Podobným vývojom podmorských robotických plavidiel ako v kapitole "Biomimetické podmorské plavidlá (Naval Research & Aeroprobe Corp.)" sa zaoberá aj výskumník biomimetických plavidiel Joseph Ayers z Marine Science Center na Northeastern University v USA v spolupráci s Massa Products Corporation.
Cieľom tohto projektu je vyvinúť biomimetického robota založeného na modeloch morského raka a morského hada. Tieto roboty používajú riadenie založené na neurónových sieťach, myomorfické stabilizátory, neuromorfické senzory a knižnicu pravidiel správania sa morských rakov a hadov. Spomínaná knižnica bola naprogramovaná na základe pozorovania týchto morských živočíchov.
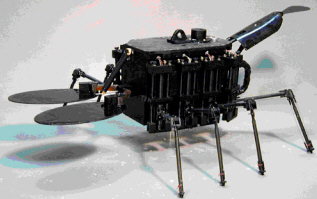
Chodiaci robot
Prvý prototyp je na svete a má za sebou úspešné testy. Ďalším cieľom je vývoj druhého prototypu, ktorý bude optimalizovaným modelom prvého prototypu. V prvom modeli sa podarilo realizovať tieto ciele:
- stabilita pohyblivosti
- zníženie napájacieho napätia
- analýza dát na výstupe každého systému robota
- vstavaný počítač
- externé batérie
- riadenie sonarom
- reflexy na základe dát zo senzorov
- auto pilot
- orientačné reflexy
- optimalizované riadenie vlnitého pohybu

Vlniaci sa robot
Ďalší vývoj bude zameraný na:
- pokračovanie v integrácii senzorov
- rozšírinie knižnice správania sa modelu
- rozvíjanie adaptácie modelu na zmenu prostredia a podmienok
- rozvíjanie autonómneho reaktívneho správania sa
- optimalizovanie riadenia výkonu
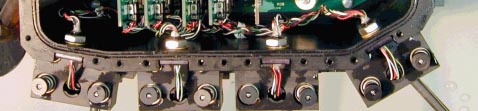
Vnútro chodiaceho robota
Parametre chodiaceho robota:
Váha na súši 3500 g.
Váha pod vodou: 100 g.
Rýchlosť pohybu:
Dopredu
Rýchlo 3.8 cm/s
Stredne 1.8 cm/s
Pomaly 1 cm/s
Do strán
Rýchlo 3.8 cm/s
Stredne 1.5 cm/s
Rýchlosť otáčania: 6.5 stupňov/s
Výška pri pohybe:
Vysoko: 11 cm
Stredne: 8 cm
Nízko: 5 cm
Stredná doba medzi poruchami svalových modulov: 47,000 cyklov
Priemerná spotreba energie:
90W
Životnosť batérie 55Min
Očakávané výsledky projektu:
Chodiaci robot a jeho riadenie. Vlniaco sa pohybujúci robot a jeho riadenie.