Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie
|
|||||||||||||||||||||

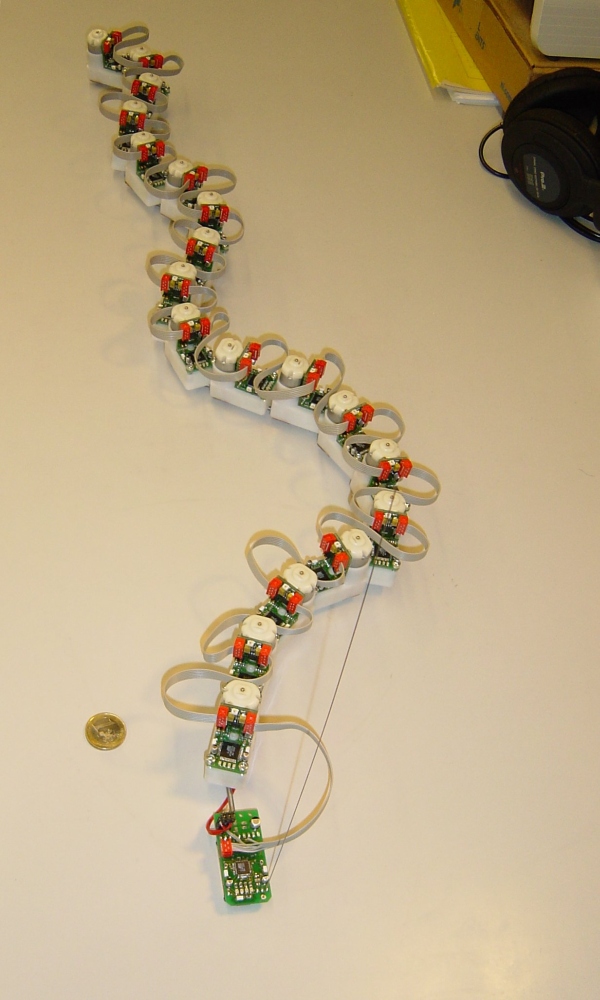
Segmentový robot
Tím ľudí v AI Lab na MIT vedený Paulínou Varshavskaya postavil autonómny mobilný robot, ktorý umožnil preskúmať zásady pohybu založené na nervovom modelu distribuovaného systému. Detailné informácie môžete nájsť na tejto stránke.
Hlavným cieľom projektu bolo uskutočniť elegantný pohyb robota s viacerými stupňami voľnosti riadením jednoduchého distribuovaného nervového systému aký môžeme nájsť v mieche živočíchov ako sú červy a hady. V takej konštrukcii je telo robota pospájané nezávislými segmentmi, ktoré sú navrhnuté ako autonómne entity, ktoré sú schopné pohnúť ďalším segmentom. Niekoľko takýchto dielov sa zmontuje a vytvoria rad segmentov. Robot sa skladá z asi 60 totožných nezávislých segmentov, ktoré sú riadené z lokálnej riadiacej jednotky. Riadiace signály sa distribuujú postupne segment po segmente. Riadiaca jednotka počas behu riadenia prijíma bezdrôtovo signály z počítača, ktorý jej vysiela nový riadiaci algoritmus. Náhodné nastavenie krátkych a dlhých signálov pohybu medzi týmito zosynchronizovanými segmentmi, tak vytvára celkový pohyb. Bezdrôtové spojenie medzi hlavným počítačom a robotom dovolí zmeniť parametre počas činnosti a tým pozorovať ako jednotlivý segment s väzbou na koeficienty, rýchlosť pohybu a amplitúdou pohybu vplýva na celý pohyb. A čo je ešte lepšie dodatočne sa môže upravovať algoritmus a preprogramovať segment počas činnosti.
U robota môžeme pozorovať rôzne pohyby založené na mimoriadne jednoduchom neurónovom algoritme. V súčasnosti sa realizuje zdokonaľovanie algoritmu s vplyvom na distribuovaný systém a porovnáva sa z hľadiska robustnosti pohybu a rýchlosti pohybu.
Celkový výsledný biologicky motivovaný pohyb pozostáva z individuálneho pohybu jednotlivých segmentov. Stále sa pracuje na vyššej modularite, tak že aj keď časť robota bude fyzicky zničená, bude schopný ďalšieho pohybu.