Cog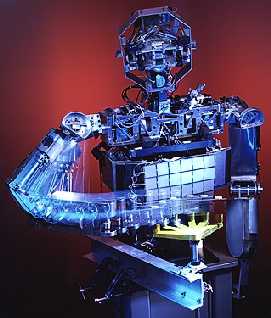
Cog je robot, v ktorom sa snažia ľudia z MIT zlúčiť viacero
podoblastí umelej inteligencie a vytvoriť tak hybridný, koherentný funkčný celok. Z
technického hľadiska môžeme považovať Cog-a za sústavu senzorov a akčných
členov, ktorá sa snaží aproximovať vnímanie a dynamiku ľudského tela.
Existujú dve dôvody prečo by sme mali zostaviť robota s humanoidnou
formou ak chceme simulovať inteligenciu na ľudskej úrovni:
- Prvý dôvod podľa Johnsona a Lakoffa je to, že forma a tvar ľudského tela je
kritická vzhľadom na to ako svet okolo seba chápeme, ako si ho interne myšlienkovo
reprezentujeme, a tieto reprezentácie potom používame v myslení aj v ľudskej reči.
Ak by sme zostavili robota s ľudskou inteligenciou, musel by mať humanoidné telo, aby
sa u neho vyvinula rovnaká alebo podobná reprezentácia okolitého sveta. Keďže však
vieme zostrojiť len veľmi hrubú napodobeninu ľudského tela vzniká veľké
nebezpečenstvo, že robot nebude mať všetky podstatné aspekty ľudského tela a tým
ani myslenia.
- Druhým a podstatnejším dôvodom je to, že na to aby sme boli človekom musíme
komunikovať s druhými ľuďmi. Aby robot získal skúsenosti z interakcie s druhými
ľuďmi musia s ním ľudia komunikovať ako s človekom a nie s robotom. Z pozorovaní
bolo totiž zistené, že len málo ľudí komunikuje s robotom ako by to bol človek (čo
je logické). Človek totiž nemá žiaden dôvod komunikovať ako s človekom s niečím
čo ani zďaleka nepripomína človeka.
Zaujímavá je tiež otázka či by robot prešiel Turingovým testom.
Sám tvorca Brooks tvrdí, že určite NIE ale neprešlo by ním ani dojča, ktorého vývoj sa snažia týmto robotom simulovať.
Okrem nôh a ohybnej chrbtice má robot všetky stupne voľnosti v
trupe, hlave a v rukách, podobne ako človek. Celkovo má robot 22 stupňov voľnosti z
toho po 6 v každej ruke, 3 v trupe, 4 v krku a 3 v očiach.
Dve hlavné ciele viedli tvorcov Coga k súčasnej forme jeho tela.
Po prvé, robot by mal byť antropomorfný (teda podobajúci sa človeku) aby komunikoval
s ľuďmi prirodzenou cestou. Najdôležitejšie charakteristiky, ktoré sa snažia
tvorcovia simulovať sú veľkosť tela, rýchlosť pohybov a rozsah pohybov.
Po druhé, robotov hardware by mal používať známe technológie a komponenty aby sa
minimalizovali náklady a čas na jeho konštrukciu.
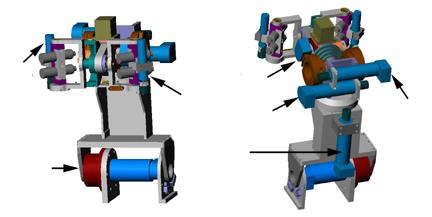
Cogov trup má 3 stupne voľnosti: driek sa môže ohýbať zo strany na stranu,
dopredu-dozadu a chrbtica sa môže taktiež krútiť okolo vertikálnej osi. Mechanické
zarážky umožňujú Cogovi pohyb len v rozsahu skutočných ľudských pohybov. (Viď
obr.)
Každá z dvoch rúk robota má skutočný rozmer priemerne dlhej
ľudskej ruky so 6 stupňami voľnosti. Pohyby sú zabezpečované silou jednosmerných
motorov cez pružný akčný člen. Pružina v akčnom člene ovláda krútiaci moment v
každom kĺbe a chráni prevody motorčekov pred otrasmi. Samotná pružnosť akčných
členov môže byť modifikovaná a tým je možné zmeniť dynamiku pohybu ruky, ktorej
pohyb je dosiahnutý cez zmenu rovnovážneho stavu kĺbov robota a nie priamym
ovládaním veľkosti uhlov medzi ramenami.
Motivácia použitia pružných akčných členov vychádza z
biologickej podstaty ľudského tela. Schopnosť pružne reagovať na okolie prirodzenou
cestou je charakteristické pre človeka: V prípade, že je pohyb ruky prerušený alebo
ruka narazí na prekážku, ruka sa jednoducho deformuje (zohne sa) vo svojich stupňoch
voľnosti, ktoré následne absorbujú náraz. Systém ma taktiež nízkofrekvenčné
charakteristiky, ktoré umožňujú plynulý pohyb ruky aj pri malých rýchlostiach
pohybu, čo poskytuje väčší čas na výpočet a taktiež možnosť použitia
výpočtových systémov s oneskorením (biologická podstata reakcií človeka)
Cogova hlava bola navrhnutá tak aby mimika a pohyby hlavy zodpovedali
rozsahu a rýchlosti pohybu ľudskej hlavy.
Hlava má 7 stupňov voľnosti, z toho 3 v očiach a 4 v krku. Dva priamo ovládané osi
krku umožňujú pohyb hlavy zo strany na stranu a dopredu-dozadu. Oči majú tri stupne
voľnosti a to stupeň voľnosti pre každé z dvoch očí umožňujúci pohyb očí
vľavo-vpravo a zdieľaný stupeň voľnosti pre pohyb očí smerom hore-dole.
Cogova hlava taktiež obsahuje viacero senzorov na vnímanie okolia. Na
napodobenie sietnice skutočného oka sú v každom oku použité po 2 kamery. Prvá
kamera zabezpečuje 120 stupňové videnie zatiaľ čo druhá 20 stupňové videnie s
vysokým rozlíšením v priamom smere. Hlava takisto obsahuje senzor, ktorý má funkciu
vnútorného ucha človeka a u tohoto robota je použitý na stabilizáciu pohľadu a v
pláne je použitie tohto senzora na udržiavanie rovnováhy. (Zatiaľ však robot nemá
nohy).Na obrázku hore možno vidieť šípkami označené stupne voľnosti hlavy.
Každý akčný člen robota je zložený dekódera signálov,
jednosmerného motorčeka s prevodovými stupňami ložísk a pružín zabezpečujúcich
absorbciu nárazov. V zásade vo všeobecnosti motory pracujú pri veľkých rýchlostiach
a malo krútiacom momente avšak väčšina robotických aplikácií vrátane tejto
vyžaduje prevádzku pri malých rýchlostiach a veľkých krútiacich momentoch. Tento
problém sa rieši prevodom hnacej sily cez prevodové stupne, ktoré akčné členy
obsahujú.
Pružný akčný člen zabezpečuje plynulú a úmernú výstupnú silu.
Ako vidno z nasledujúceho obrázku ruka je modelovaná na základe biolgickej
inšpirácie funkcie svalov. Kĺb (stupeň voľnosti) je zabezpečený pružinami A a B.
Ľubovoľný rovnovážny stav ruky sa dá potom nastaviť nastavením pružných členov
A a B a na to aby bola ruka vychýlená z rovnovážneho stavu je potrebná sila, ktorá
je zabezpečená motorom. Po vykonaní akcie sa ruka vráti späť do rovnovážnej
polohy. Keďže akčné členy vedia absorbovať náraz, nevzniká žiadne riziko
poškodenia ruky robota.
V súčasnosti má robot nasledovné schopnosti:
- Pohyby očí:
- dostatočne rýchle pohyby očí
- plynulé sledovanie pohybujúceho sa predmetu
- očný reflex, ktorý zabezpečuje fixáciu očí na predmet zatiaľ čo trup a hlava sa
pohybuje.
- Orientácia hlavy a krku:
- umožňuje Cog-ovi nasmerovať hlavu v smere sledovaného objektu.
- Rozoznávanie tvárí a rozoznávanie očí:
- robot dokáže v prostredí rozoznať človeka na základe určitých vzoriek,
hľadaním oválnych tvarov a zameraním sa na farbu ľudskej pokožky.
- Jednoduché vizuálne schopnosti:
- detekcia pohybu (použitím rozdielu medzi za sebou idúcimi frame-ami)
- filter na farbu ľudskej kože
- dokáže rozoznávať saturáciu farieb
- Siahnutie na vizuálny cieľ:
- robot sa naučil najprv nasmerovať hlavu smerom na premet (vizuálny cieľ) a neskôr
sa naučil aj tento predmet vziať. Učenie bolo nekontrolované a robot sa to naučil
metódou pokusov a omylov, bez toho aby mu niekto povedal či ten predmet skutočne vzal
alebo nie.
- Oscilačné pohyby (použitím neurooscilátorov):
- dokáže krútiť kľukou
- píliť
- použitím neurooscilátorov dokáže hrať na bubon v rytme. Cog dokázal počúvať
bubon a dokázal sa zosynchronizovať s rytmom, ktorý počul.
|