|
Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie
|
|
Biomimetické podmorské plavidlá (Naval Research & Aeroprobe Corp.)
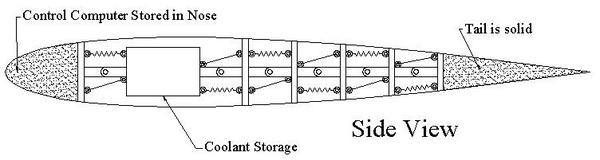
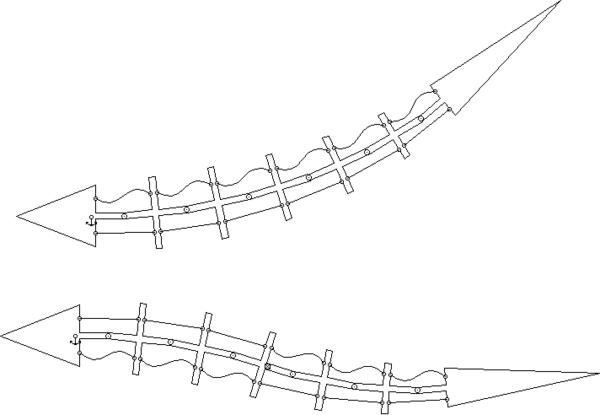
Pohon a spôsob riadenia pre podmorské plavidlá sú vyvíjané podobne ako to nachádzame u podmorských živočíchov. Život pod morom vlastní "intuitívne" vedomosti o hydrodynamike, ktoré sú našimi vedomosťami dosiaľ neprekonané z pohľadu pohyblivosti a efektivity. V tomto biomimetickom výskume a vývoji bude pohyb rýb napodobňovaný a reprodukovaný tvarovateľným objektom, ktorý je zobrazený na priložených obrázkoch. Z uvedených pozorovaní sa budeme snažiť porozumieť základnej hydrodynamike rýb a vyvinúť príslušné hydrodynamické algoritmy.
Bude použitá najnovšia modelovacia (Shape Memory Alloy (SMA)) technológia a technológia podmorského pohonu pre dosiahnutie spojitého riadenia spomínaného objektu. Prieskum bude riešiť problém pohonu riadeného SMA snímačmi na povrchu objektu, ktoré budú imitovať impulzy zo svalov rýb.
V oblasti riadenia nelineárnych hydrodynamických systémov je nutné implementovať adaptívne sa učiace algoritmy cez ktoré sa bude podmorské plavidlo postupne učiť o hydrodynamike svojho "tela". Učiaci proces bude simulovať kognitívne systémy zvierat a ľudí, v ktorom tento algoritmus postupne aktualizuje svoju "vedomostnú základňu". Tieto vedomosti potom stále používa pri generovaní svojich odoziev na vonkajšie prostredie.
Ako vhodný typ algoritmu sa javia Genetické neurónové siete, ktoré dajú plavidlu evolvujúcu autonómnú "myseľ". Tento proces povedie plavidlo k samooptimalizácii jeho pohybov vzhľadom na hydrodynamiku okolitého prostredia. Každá z týchto úloh bude riešená cez kombináciu reálnych experimentov, počítačovej simulácie a predikcie.
Manévrujúce samohybné plavidlo vo vodnom tuneli nám dá ideálne prostredie pre testovanie a ďalší vývoj. Cieľom tohto výskumu je zlepšiť hydrodynamiku, manévrovateľnosť a riadenie podmorských plavidiel.
Táto práca by mala viesť k vytvoreniu samopohybujúceho sa a samoadaptujúceho podmorského plavidla, ktoré môže byť použité pre rôzne podmorské operácie. Veľké využitie sa očakáva hlavne v operáciach ohrozujúcich život človeka alebo pri rutinnej často sa opakujúcej činnosti, ktorá nepotrebuje ľudskú interakciu. Vízia predpokladá automatizované plavidlo s kamerou a robotickými rukami.
|
|
Kontakt: Marek Bundzel |
