Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

História
Elmer a Elsie boli postavené medzi veľkou nocou 1948 a Vianocami 1949. Mali rovnaké zapojenie a elektroniku, ale ich kryty a motory boli rozdielne. A hoci ich v 1949 a 1950 predstavil aj verejne, neboli veľmi spoľahlivé a potrebovali častú údržbu. Preto v roku 1951 Walterov technik Bunny Warren navrhol a postavil pre Waltera šesť nových korytnačiek, ktorých konštrukčný štandard mal vysokú profesionálnu úroveň. Tri z nich boli predstavené na Britskom festivale (1951) a ostatné v priebehu 50-tich rokov.
A ako pokračoval ich príbeh ďalej ? O Elmer a Elsie nie sú žiadne zmienky, pravdepodobne boli použité na stavbu nových robotov. Nuž a osud ďalších šiestich je v skratke tu:
- Tri boli po Britskom festivale vydražené, a pár rokov prežívali celé až do požiaru, kde dve z nich zhoreli. Tretia nekompletná, ale ešte stále funkčná, bola darovaná Smithsonian Institute, kde chradne nenavrátená a nevystavená dodnes.
- Jedna bola v 1953-ťom zaslaná do USA, určená na vývoj tranzistorových detských hračiek. Bola rozobraná na štúdium, a potom navrátená do UK v kúskoch, ktoré boli ďalej použité už iba ako náhradné diely. Projekt z hračkami nepriniesol absolútne nič...a zostal z neho len popis tranzistorového obvodu.
- Ďalšia bola zaslaná do štátu New York v 1970-tom, keď Walter ležal v kóme v Bristole po tragickej nehode, ktorá ukončila jeho kariéru. Nezachovala sa žiadna zmienka o adrese na ktorú bol robot zaslaný. Existuje iba jediná stopa v Burdenovom Neuroligickom Inštitúte, ktorý spomína že adresát mal dočinenia z nejakým múzeom. O tejto korytnačke sa už od vtedy nič viac nepočulo.
- Po smrti Grey Waltera zostala jediná. Patrila jeho synovi Nicolasovi, ktorý ju
zachoval v bezpečí, kým sa Univerzita Brunel nerozhodla opraviť ju, pre Walterov
Memoriál v 85-tom. Odstránili pôvodný akumulátor a jeho hliníkový držiak a
nahradili ho nepekným a nevhodným držiakom štyroch suchých batérií. Po výstave ju
vrátili do Brunelu. Nicolas Walter ju potom o pár rokov zachránil, keď zistil že bola
vlastne odhodená. Odložil ju do svojho suterénu, kde zotrvala až do roku 1995, keď ju
Owen Holland konečne našiel po mesiacoch pátrania. Potom bola pozorne premiestnená do IAS
Lab a daná na verejné predvedenie v Burden Neurological Institute v marci
1995 kde bola predvedená množstvu formálnych kolegov Grey Waltera. Dnes je permanentne
vystavená v Bristole v Burden Institute.
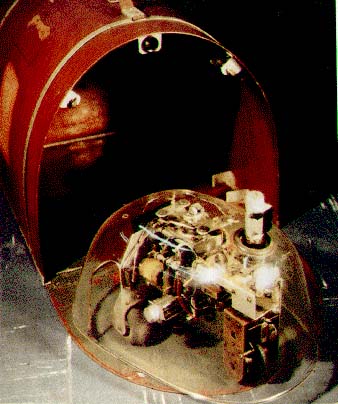
Na obrázku je Elsie aj s originálnym obalom "domčekom" po jej znovuobjavení v suteréne.
Súčasný stav
Na pedagogické a vedecké účely, by však bolo vhodné mať "funkčnú" verziu robota. Vytvorenie repliky s existujúcich záznamov nie je možné, lebo zachované konštrukčné detaily sú nepostačujúce. Bristolský exemplár (1951) je síce ešte stále vo funkčnom stave, ale je príliš krehký na to aby sním boli vykonávané akékoľvek experimenty.
Riešenie sa našlo obvyklým spôsobom v roku 1995. Medzi májom a júlom toho roku bol vzatý Bristolský originál korytnačky, a tento bol použitý ako základ pre nové korytnačky. Projekt bol pod vedením Bunny Warrena, návrhára originálu v roku 1951, ešte stále pracujúceho v Burden Institute. Tento muž bol ešte aj dnes schopný vyrobiť množstvo identických súčiastok vrátane priesvitného krytu (plexisklo) - Perpexu, a vďaka nemu mohli byť nové repliky skutočne veľmi podobné originálu jednak vzhľadom ale hlavne aj správaním. Dve vyrobené repliky Ninja a Amy boli prvý krát predvedené na druhej európskej konferencii o umelom živote v Granade (Španielsko), v júly 1995. Repliky korytnačiek sú používané jednak na učebné účely, tiež na vedecké demonštrácie ich správania, ale aj na ďalšie a hlbšie skúmanie a analýzu formálnych prejavov ich správania.
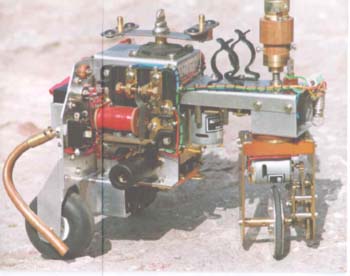
Toto je jedna z korytnačiek s odstráneným krytom. Ako aj vidno bolo použitých toľko
originálnych častí koľko len bolo možné. Hoci napr. motory sú už nové, vzhľadom
na ich vtedajšiu veľkú poruchovosť a nefunkčnosť.
Trošku iný prístup zvolil Michael Gaspery, ktorý sa tiež pokúsil postaviť svoju repliku Walterovych originálov. Ako stavebný materiál použil Lego.
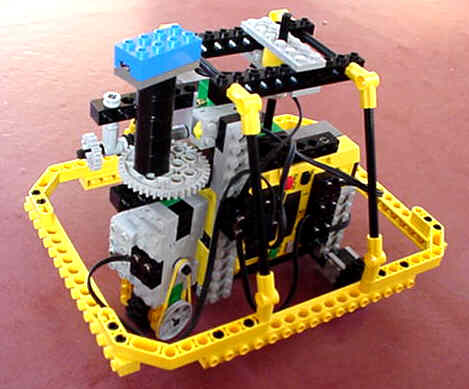
Ako vidno, motor ktorého úlohou je pohon, je uložený vpredu na vidlici. Riadiaci motor je pripevnený k telu korytnačky a otáča riadiacou vidlicou cez závitový prevod. Svetelný senzor je napevno pripevnený k riadiacemu agregátu takže je vždy orientovaný na smer pohybu. Na obrázku je už tretia generácia Lego verzie Walterovych robotov.
Grey-ove korytnačky mali riadiaci agregát otáčajúci sa o 360 stupňov, a iba v jednom smere. Na dosiahnutie takejto činnosti je potrebný kolektor, ktorý by zabezpečoval napájanie motora umiestneného na otáčajúcej sa vydlici. Keďže neexistuje taká Lego súčiastka, autor riešil problém pridaním prepínača detekujúcim polohu riadiaceho agregátu. Keď bol agregát orientovaný spätne, prepínač prepol otáčanie motora do opačnej strany, čím bol docielený taký istý efekt ako pri origináli.
Pohon je sprevodovaný cez remeňový prevod, ktorého úlohou je jednak spomaliť prevod ale tiež aj zjemnenie pohybu. Keďže rýchlosť otáčania sa motora je aj pri najnižšom stupni príliš vysoká, bol použitý model napájania chvíľu-zapnuté-chvíľu-vypnuté na spomalenie chodu motora.