Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Správanie
Ako už bolo popísané v úvode, technická realizácia korytnačiek nebola zložitá.
Ich sila spočívala v spojení jednoduchého elektronického obvodu a technického
vybavenia - kormidlo otáčajúce sa iba do jednej strany, svetelný senzor orientovaný vždy
v smere pohybu, osobitný motorček na ovládanie smeru pohybu a osobitný pre posun
dopredu - toto všetko dokázalo produkovať vždy nové, nepredvídateľné správanie.
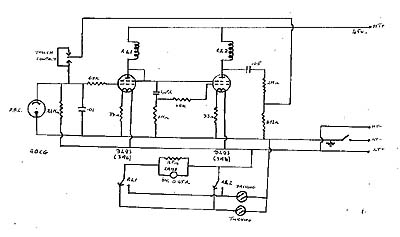
Z originálneho nákresu schémy vidno jednoduchosť zapojenia. Srdcom boli dva neuróny
- elektrónky (tranzistory v dnešnom ponímaní) ktoré hrali úlohu združovania
senzorov, jednak orientovaného svetelného a jednak dotykového, ktorý bol aktivovaný
cez vonkajší kryt pri akomkoľvek kontakte s vonkajšou prekážkou (toto priviedlo
tranzistory na istý čas do oscilácii). Roboty boli napájané jednosmerným napätím z
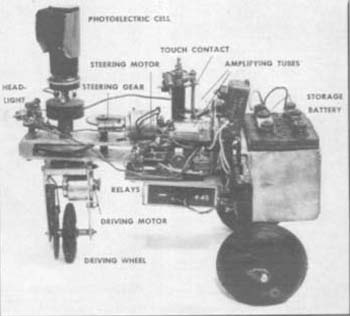
akumulátora, ktorý bolo nožné dobíjať. Na obrázkoch je vidieť schému a originálnu fotografiu konštrukcie Elsie bez krytu, aj s
popisom jej častí. Prezývku korytnačka dostala pre svoj tvar v zakrytovanom stave. Batériu
vidno na obrázku v vpravo, v zadnej časti korytnačky.
Prejavy správania

Nasledovná séria obrázkov popisuje pokusy ktoré Walter urobil ešte v roku 1950. Použil pri nich fotoaparát z dlhým expozičným časom. Na telo každej korytnačky pripevnil malú žiarovku ako zdroj svetla, ktorá vlastne vypaľovala pri pohybe robota do snímky dráhu pohybu. Toto je prvá z deviatich snímok vytvorených v tom čase . Tu sa Elsie približuje k svetlu a potom okolo neho krúži v istej vzdialenosti.

Elsie sa vracia do svojej búdky, idúc za svetlom.
Najskôr Elsie nevidí svetlo, ktoré je kryté clonou, preto hľadá svetlo pre ňu charakteristickým oscilačným pohybom. Pri hľadaní sa jej však do cesty dostala prekážka (clona), ktorú musela najskôr zdolať. Po jej prekonaní sa konečne dostala na svetlo, za ktorým potom išla najkratšou možnou trasou, aby po dosiahnutí cieľa mohla opäť krúžiť okolo spomínaného svetla.
Tu sa Elsie naozaj bravúrne vyhla nástrahe v podobe dosky a po jej obchôdzke pokračovala krúžením okolo zdroja svetla.

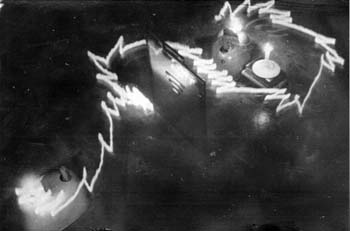
Tu vidno Elmer a Elsie vo vzájomnom pôsobení. Každý z robotov najprv smeroval k tomu druhému a zapadli tak do fascinujúceho tanca. Sociálne správanie začali vlastne vykazovať všimnutím si svetla na kryte partnera. Žiarovky boli pôvodne nainštalované iba kvôli poskytnutiu možnosti zachytiť na fotografiu dráhu pohybu, avšak ukázalo sa, že je to zároveň aj akýsi podnet k sociálnemu správaniu sa korytnačiek. Paradoxom je, že po zapnutí svetla v búdke (domčeku) sa začali navzájom ignorovať a obidva roboty utekali za svojím domovom. Možno si tu všimnúť, že Elmerov kryt je vyrobený z mnoha kúskov materiálu.

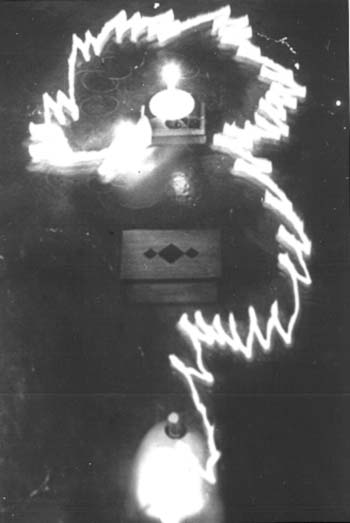
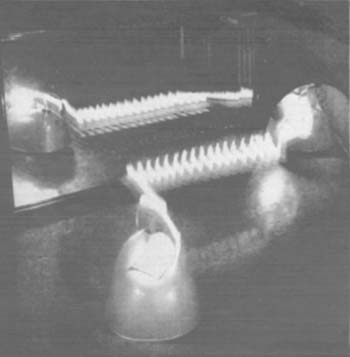
Na tejto fotografii je zachytené správanie, ktorému dával Grey Walter veľkú dôležitosť. Najskôr Elsie nasledovala horný zdroj svetla a začala okolo neho krúžiť. Avšak keď zbadala záblesk druhého svetla, prešla dopredu a pokračovala v krúžení okolo tohoto druhého svetla. Grey Walter tvrdil, že toto je prejav schopnosti výberu medzi rôznymi alternatívami.
Elsie predvádza famózny "zrkadlový" tanec.

Elsie vstupuje do búdky. Všimnite si, že nabíjačka baterky je umiestnená vzadu v búdke. Grey Walter umiestnil nabíjací terminál na podlahu, aby takto umožnil automatické nabíjanie korytnačiek v prípade že potrafili do búdky.
Machina docilis
Po zostavení svojho prvého robota, pridal Walter k pôvodnej kreatúre ešte niekoľko súčiastok čím vznikol nový robot a nazval ho Machina docilis. Postavené na rovnakom fyzickom základe ako predchádzajúce roboty, obsahovali tieto navyše model podmienených reflexov CORA (Conditioned Reflex Analogue), ktorý demonštroval jednoduché Pavlovové učenie. Nové roboty mali tri senzory:
- zvukový snímač
- svetelný senzor
- dotykový spínač
Usporiadanie súčiastok do obvodu CORA, poskytovalo možnosť dosiahnuť
naučené prepojenia medzi troma senzormi a hnacím motorom. Toto potom vyústilo v možnosť
učenia sa rôznych prejavov správania, ktoré boli podnecované zvukom, svetlom alebo
dotykmi.
Tento druh zapojenia je štrukturálne veľmi podobný k neurónovej štruktúre, len
nedávno identifikovanej v morskom slimákovi.
Takéhoto robota trénoval napr. vydaním piskľavého zvuku - zapískaním, a následným úderom do krytu, ktorý bol prepojený s dotykovým spínačom. Po piatich, alebo šiestich úderoch, vždy po zapísknutí, sa Machina docilis už vždy otočila a odvrátila sa od imaginárnej prekážky.
Srdcom zapojenia CORA bol kondenzátor pripojený k obom vstupom - zvukovému aj dotykovému. Ak dotyk nasledoval ihneď po písknutí, kondenzátor sa začal nabíjať, až kým nedosiahol prahové napätie. V tomto bode sa vybil a otvoril elektronické hradlo, ktoré spôsobovalo že písknutie malo taký istý efekt ako buchnutie do robota a teda zopnutie dotykového spínača. Ak neboli tieto podmienky dlhšiu dobu ďalej posilňované, postupne zanikli a model podmieneného správania CORA zabezpečil uzavretie elektronického hradla.