Prírodou inšpirované algoritmy
študijné materiály pre projekt mobilnej triedy umelej inteligencie

Roboty tvoria roboty


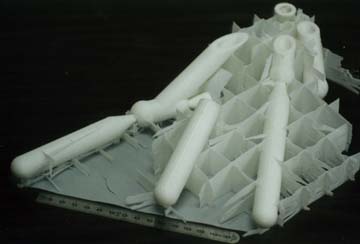
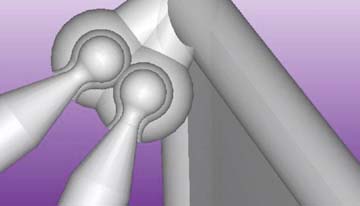
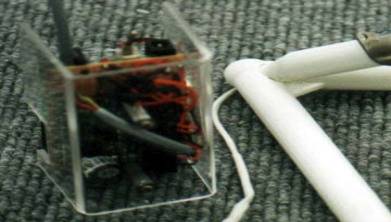
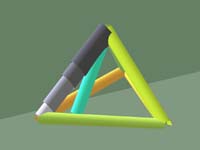
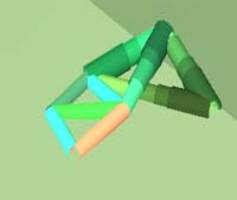
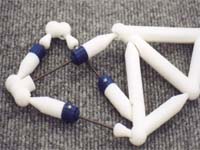
Virtuálny model robota Arrow. Skutočný robot Arrow.

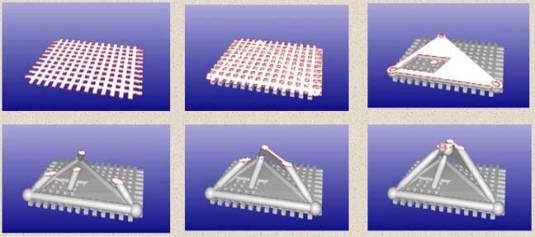
Pohybujúci sa robot Arrow
Vedci z Brandeis Univerzity vo Walthame (Massachussetts, USA) skúmajúci tzv. Umelý život dospeli k významnému míľniku. Podarilo sa im vytvoriť počítačový systém, ktorý automaticky projektuje, vyvíja, overuje a nakoniec zostrojí viacero druhov mobilných tvorov bez signifikantného ľudského zásahu.
V rámci projektu Golem (Genetically Organized Lifelike Electro Mechanics),vytvorili Hot Lipson a Jordan B. Pollack revolučný automatický systém na navrhovanie a výrobu mobilných robotov s minimálnym zásahom človeka. Vedcom sa podarilo naprogramovať počítač tak, aby dodržiaval pravidlá evolúcie a navrhoval roboty v súlade s princípmi prírodnej selekcie.
Počítač potrebuje poznať iba údaje o súčiastkach s ktorými bude pracovať, fyzikálne vlastnosti prostredia, v ktorom sa majú vyrobené roboty pohybovať a účel pohybu, Program pracuje s vopred určenou množinou blokov, z ktorých budú zostavené navrhnuté roboty. Stavebné bloky mechanickej štruktúry sú napr. plastické rúrky, rotačné, lineárne a planárne kĺby a akčné členy, zatiaľ čo umelé neuróny predstavujú stavebné bloky riadenia. Virtuálne modely sa navrhujú a selektujú pomocou genetického algoritmu, ktorý vyhodnotením funkcie vhodnosti dokáže rozpoznať najprispôsobivejšie a najvhodnejšie modely v danej populácií kandidátov a prenášať ich vlastnosti na modely ďalších generácií. Potomkovia vznikajú z vhodných modelov pridávaním, modifikáciou a odstraňovaním stavebných prvkov.
Nevyhovujúce modely sa z evolučného procesu vyraďujú. Evolučný programový systém
v počítači je spojený s prototypovým zariadením, ktoré podľa získaných modelov
vyrába skutočné roboty zložené z rúrok kĺbov a krokových motorov.
Konštrukcia robota sa
vytvára postupným nanášaním tenkých vrstiev termoplastickej hmoty tzv. technológie
3D printing. Na ovládanie motorov sa používajú umelé neurónové siete,
ktoré sa z evolučného programu, kde boli navrhnuté, kopírujú do mikropočítača,
ktorý riadi pohyb robota.
Zásah človeka je potrebný iba pri vkladaní motorov do umelohmotných konštrukcií. Výborné výsledky boli dosiahnuté pri adaptácií robotov na vonkajšie prostredie. Počítač nedostal od človeka žiadne know-how, hoci všetky druhy pohybového mechanizmu sú dobré - roboty lezú, kotúľajú sa, plávajú. Riadenie pohybov a kinematika sa vyvíjajú paralelne.
TETRA:

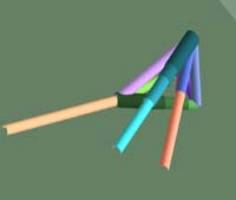
RATCHET:

SNAKE:
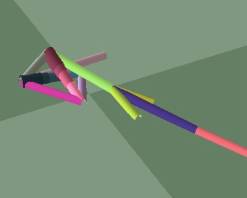

BIPED:


CRAB:
Verejnosti je sprístupnený virtuálny robot Complex 1., ktorý vznikol v rámci počítačového programu DEMO. Každý jeden krok na tomto robote ( s výnimkou triviálneho hardvérového zapojenia ) realizoval počítač.
Doteraz väčšina umelých systémov ostávala uložená v pamäti počítačov. Až Hot Lipson a Jordan Pollack spravili prvý krok v smere premostenia priepasti medzi počítačovými modelmi a fyzikálnou realitou. Opísali systém, ktorý v počítači vyvinie ťahové mechanizmy a následne ich automaticky skonštruuje. Využíva pritom rýchlu prototypálnu technológiu, takže sú schopné vo fyzikálnom svete pohybu.
J.Pollack predpokladá, že nárast komplexity robotov by nemal viesť k ich vymknutiu sa z rúk vytvorením ich autonómnych mutácií. Ale aj tak skôr alebo neskôr sa úplne autonómny umelý život zrealizuje. Následne sa dá očakávať, že syntetické kreatúry robotov nabehnú na trvalý udržateľný rozvoj – evolúciu.
V duchu opatrného optimizmu je treba mať na zreteli tri robotické zákony Isaaca Asimova, ktoré umožňujú koreláciu ľudského svedomia s robotikou aj v budúcnosti.
Pohyb robotov v piesku viď. video